Pointcloud#
This example shows you two ways to load a pointcloud.
In the first example, you serve the pointcloud as an ply file, and have the webclient read direclty from your file system.
This approach, however can be a bit slow, and won’t work with pointcloud data that are updated at real time. In the second example, you load the pointcloud into python and then send the parsed vertices and the color information via the PointCloud component.
We apply a few tricks to make the pointcloud transmit faster. See the Why is it so much faster? section for more details.
You should expect to see a scene that looks like the following:
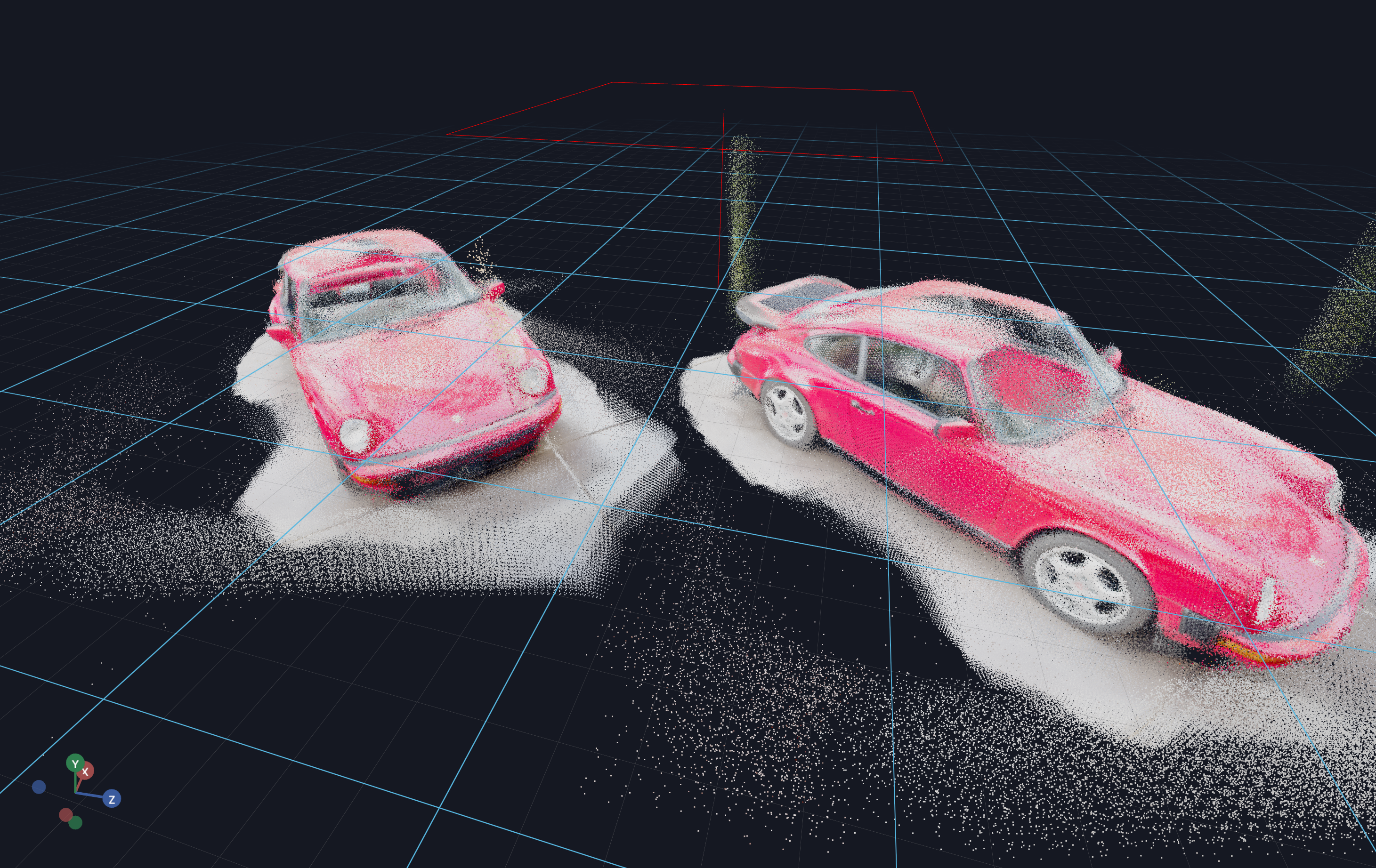
The second pointcloud should load significantly faster than the first one, due to its smaller size. We use half-precision for the vertices, and Uint8 for the colors. This cuts the overall size by half.
Why is it so much faster?#
Why is it so much faster?
We accelerate pointcloud rendeirng by using a custom, half-precision format for the vertices, and Uint8 for the colors. This cuts the overall size by half.
Alternative is to use compression algorithms designed specifically for geometric data (such as Draco, or just simple LZ4 (or LZW). For depth images, LZW tend to work well due to near-by pixels being highly correlated.
from asyncio import sleep
from pathlib import Path
import numpy as np
import open3d as o3d
from vuer import Vuer
from vuer.events import Set
from vuer.schemas import DefaultScene, Ply, PointCloud
assets_folder = Path(__file__).parent / "../../../assets"
test_file = "static_3d/porsche.ply"
# trimesh has issue loading large pointclouds.
pcd = o3d.io.read_point_cloud(str(assets_folder / test_file))
app = Vuer(static_root=assets_folder)
@app.spawn(start=True)
async def main(proxy):
proxy @ Set(
DefaultScene(
Ply(
src="http://localhost:8012/static/" + test_file,
size=0.008,
position=[0, 0, 5],
),
PointCloud(
key="pointcloud",
vertices=np.array(pcd.points),
colors=np.array(pcd.colors),
position=[0, 0, 0],
size=0.008,
),
# y-up
up=[0, 1, 0],
),
)
while True:
await sleep(1)